切换到宽版
登录
立即注册
找回密码
搜索
搜索
本版
用户
快捷导航
首页
BBS
最新发布
解压密码
-> 本站插件全部免费下载 <-
FSXChina模拟飞行
»
首页
›
[ 更新/导航/共用插件和教程 ]
›
『 导航和共用插件 』
›
[X-Plane12] Philipp Munzel - CIVA Navigation System ...
返回列表
发帖
查看:
7145
|
回复:
0
[X-Plane12] Philipp Munzel - CIVA Navigation System 导航系统 V2.0.2
3ha088
当前离线
积分
63794
IP卡
狗仔卡
3ha088
发表于 2025-8-3 09:19:21
|
显示全部楼层
|
阅读模式
插件信息
更新时间:2025-08-03
插件大小:14.6 MB
插件版本:V2.0.2
支持平台:[X-Plane12]
1
/
1
!show_all!
!show_tip!
!close!
1/1
特点:
- @, u$ ]! L% ]( H) R
- 支持X-Plane 12平台
: J- y9 M. X( F& t
- 更优化的用户界面
/ e! g+ v! g! I* C& w
- 双套或三套并联安装支持
% U8 Z. N) ~8 F
- 支持副驾驶独立仪表、飞行指引仪与自动驾驶仪
, b) s+ J- U0 `' b0 j0 m/ n
- 兼容所有现有单套驾驶舱集成方案的机型
1 h* V1 j, w; W8 M
- 辅助定位:单/双DME更新及三信号混合
6 W$ a5 {0 {7 ?
- 完整自检系统,故障时显示真实错误代码
1 `& A. j/ I% P1 Y- n2 N
- 协和专用版含特殊自检逻辑(普通版超音速飞行时会报错)
4 F* y4 @1 }/ Y; f' Z4 x& T
- 支持地面/空中部分加载X-Plane .fms格式飞行计划
& D, |) y E1 O, Z7 o( q' A
- 内置谷歌地图/航海坐标输入辅助界面
" F+ _+ u! p, x; |1 B* s: W
- 支持鼠标滚轮操作
' b& J4 l: v) {
- 仅兼容X-Plane 12(不支援旧版本)
. E! a5 c! c1 i" ?" @2 ~" ?
- 原生支持M1芯片Mac设备
. ]8 S/ \: }( g5 C0 u
- 可完全按照1977年原始手册操作(含故障排除流程)
" }! y3 ]+ s2 q1 {. Q5 ?* m
x. e' ]& G7 n7 I
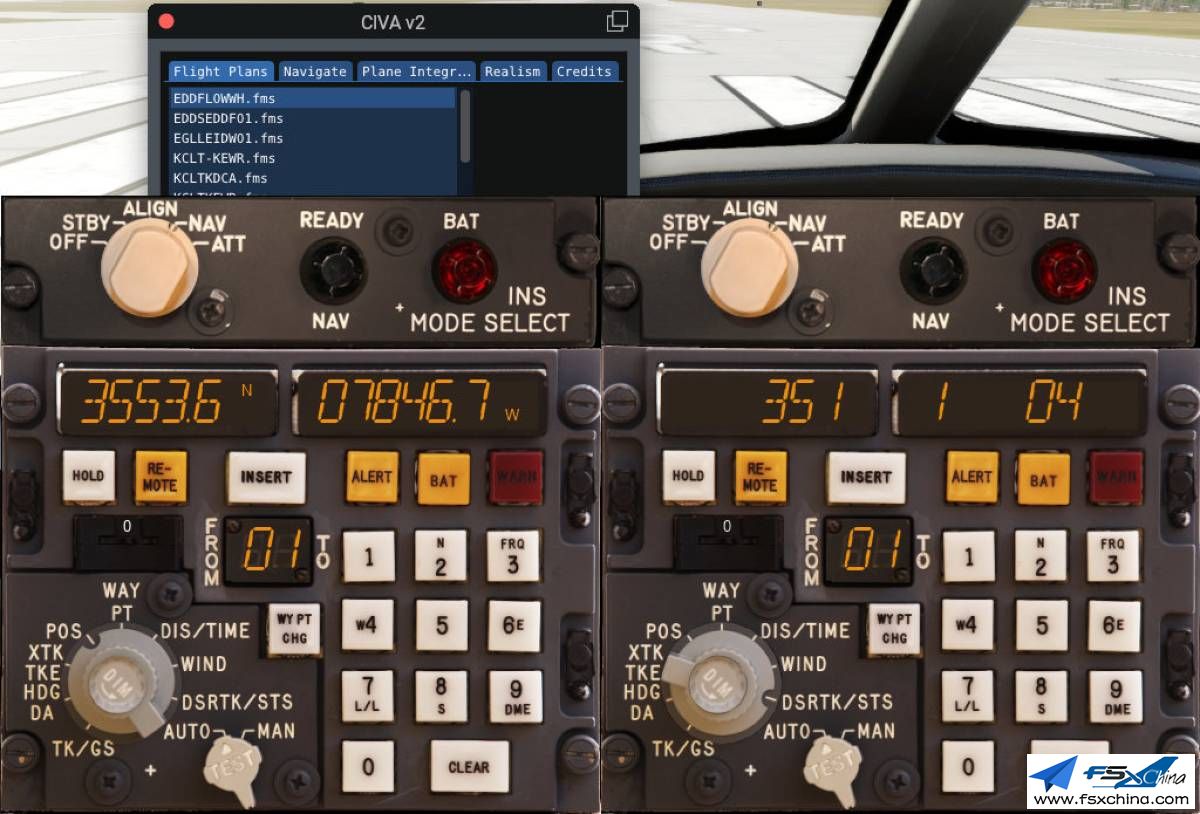
德尔科Carousel IV-A惯性导航系统(昵称"CIVA"):
: k) }( D+ q* F4 v6 _
作为无需外部参照的自主导航设备,该系统通过计算机、运动传感器和陀螺仪持续解算飞行器的位置、姿态与速度(航位推测法)。在90年代GPS普及前,它无疑是民航领域最主流的惯性导航系统,曾装备于707、727、部分737-100/200、DC-10、L-1011三星客机以及早期747-100/200/300等机型。
2 \4 T/ m r) J# \
" o# S' o3 [$ S3 Q4 {" J
核心特性:
6 K' O( X6 \+ n- R' O* v2 f
- 完美兼容FlyJSim 727系列(亦支持其他机型)
) ^3 |' t) i) T7 b2 |
- 拟真预热-初始化-校准流程
1 I7 l9 H3 I& a* L
- 可选快速校准立即投入飞行
5 m+ y C4 L$ j: J, h: l5 V
- 完整模拟所有显示模式(含HOLD模式):
6 }+ l1 H7 j0 }% } |6 T+ y; `
可显示地速、航迹角、偏流角、航迹偏差、位置信息、剩余距离、预计航程时间、风速风向、纵向加速度及顺逆风分量等参数
% w* j4 @! g, j% S
- 自动导航最多9个航路点
: a6 y$ y' X1 _! V/ d' K4 ?
- 可加载X-Plane飞行计划替代手动输入
; j9 s: Z f8 t' l
- 结合DME高度的单站更新功能
/ j+ J$ F/ T- L& a
- 拟真位置漂移与平滑更新算法
! l/ P9 o* N+ y6 u0 ^3 Y: c- o
- 内置30分钟应急备用电源
6 ^+ o7 b9 G1 q5 _
' B" d- s' _$ m
百度网盘:
, y8 K- _8 @/ o7 J# g6 Y
请点击此处下载
提取码:
6235
下载点数:
免费
回复
使用道具
举报
提升卡
置顶卡
沉默卡
喧嚣卡
变色卡
显身卡
返回列表
发帖
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以回帖
登录
|
立即注册
本版积分规则
发表回复
回帖并转播
回帖后跳转到最后一页
快速回复
返回顶部
返回列表


 IP卡
IP卡 狗仔卡
狗仔卡


 请点击此处下载
请点击此处下载 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 显身卡
显身卡